KUKA KCP4与库卡机器人密切关联,KCP4(库卡控制面板)是用于库卡机器人系统的手持编程器,KCP4具有KUKA机器人系统操作和编程所需的所有功能。
KUKA库卡机器人KRC4示教器介绍:
KUKA示教盒液晶屏,库卡KRC4触摸屏,库卡KCP4示教器电路板,KUKA KCP4面膜/按键板,库卡KCP4 6D鼠标/摇杆,KCP4驱动开关,KCP4急停开关,KCP4使能开关等。

库卡于1898年在德国奥格堡成立,是世界几家顶级工业机器人制造商之一,1973年公司研发的FAMULUS第一台工业机器人诞生。库卡机器人公司在全球拥有20 多个子公司,涵盖了美国、墨西哥、巴西、日本、韩国、中国、台湾、印度和绝大多数欧洲国家。库卡机器人的负载由5KG到6500KG,广泛应用在仪器、汽车、航天、食品、制药、医学、铸造、塑料等工业上,主要应用在机床上下料、装配、雕刻、焊接、打磨、抛光等领域。
库卡KUKA工业机器人年产量超过1万台,至今已在全球安装了15万台工业机器人。库卡可以提供负载量从3KG至1000KG的标准工业6轴机器人以及一些特殊应用机器人,机械臂工作半径从635mm到3900mm,全部由一个基于工业PC平台的控制器控制,操作系统采用Windows XP系统。 库卡机器人广泛应用在仪器仪表、汽车、航天、消费产品、物流、食品、制药、医学、铸造、塑料等工业。主要应用于材料处理、机床装料、装配、包装、堆垛、焊接、表面修整等领域。库卡在各个行业与卓越的行业专家合作,为您提供最理想的解决方案。集成商们通过库卡的合作伙伴网络整合到一起。与各行业机器制造商、系统合作伙伴以及创新的终端用户的紧密合作是库卡成功的基石之一。不断挑战自我,并不断将我们的解决方案完美化,使得我们不断前进并更加成功。
详细介绍
KUKA KCP4与库卡机器人密切关联,KCP4(库卡控制面板)是用于库卡机器人系统的手持编程器,KCP4具有KUKA机器人系统操作和编程所需的所有功能。
KUKA库卡机器人KRC4示教器介绍:
KUKA示教盒液晶屏,库卡KRC4触摸屏,库卡KCP4示教器电路板,KUKA KCP4面膜/按键板,库卡KCP4 6D鼠标/摇杆,KCP4驱动开关,KCP4急停开关,KCP4使能开关等。
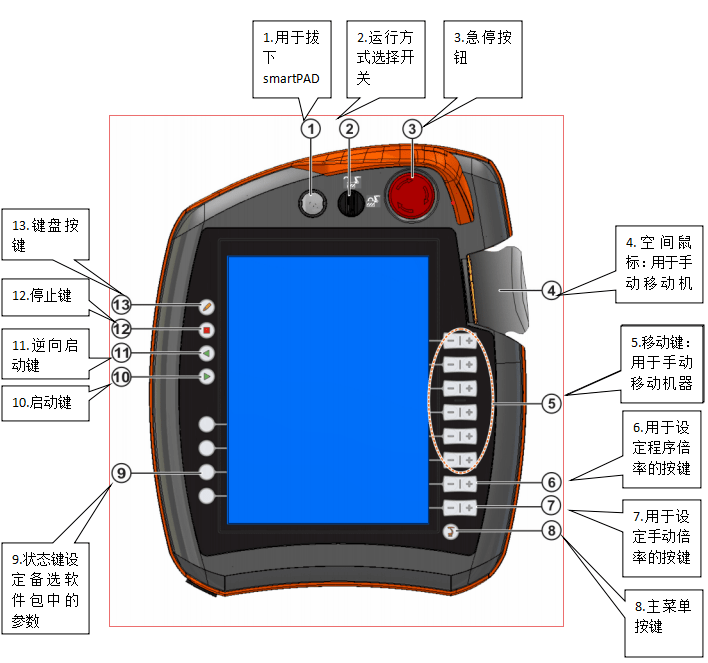
库卡机器人KCP4示教器 smartPAD 正面
1 、用于拔下 smartPAD 的按钮
(>>> 4.1.3 "取下和插入 smartPAD" 页面 44)
2 、运行方式选择开关:开关可按以下选型进行设计:
• 带钥匙
只有在插入钥匙的情况下才能更改运行方式。
• 不带钥匙
通过运行方式选择开关可以调用连接管理器。通过连接管理器可以切换运行方式。
(>>> 4.15 "更换运行方式" 页面 64)
3 、紧急停止装置:用于在危险情况下关停机器人。按下紧急停止装置时,它将会自行闭锁。
4 、空间鼠标:用于手动移动机器人
5 、移动键:用于手动移动机器人
6 、用于设定程序倍率的按键
7 、用于设定手动倍率的按键
8 、主菜单按键:用来在 smartHMI 上将菜单项显示出来。此外,可以通过它创建屏幕截图。
9 、状态键:状态键主要用于设定备选软件包中的参数。其确切的功能取决于安装的备选软件包。
10 、启动键:通过启动按键,可启动一个程序。
11 、逆向启动键:按下逆向启动键逆向启动一个程序。程序将逐步执行。
12 、停止键:用停止键可暂停运行中的程序。
13 、键盘按键:
显示键盘。通常不必特地将键盘显示出来,因为 smartHMI 可识别需要通过键盘输入的情况并自动显示键盘。
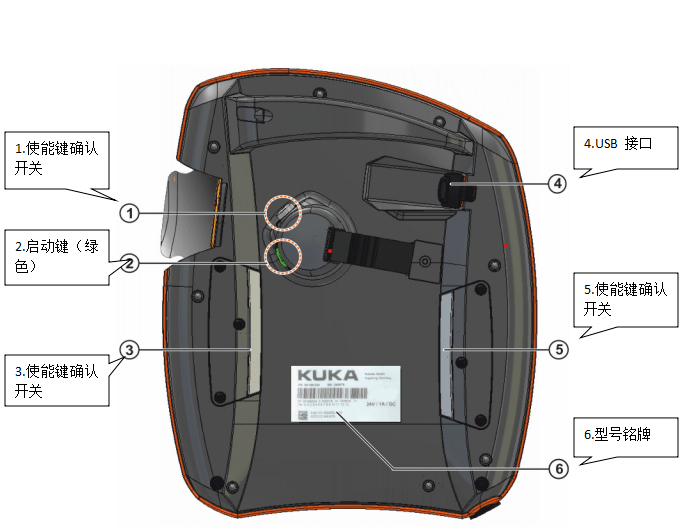
库卡机器人KCP4示教器smartPAD 背面
序号 说明
1 、确认开关
确认开关具有 3 个位置:
• 未按下
• 中位
• 完全按下(紧急位置)
只有当至少一个确认开关保持在中间位置时,方可在测试运行方式下运行机械手。
在采用自动运行模式和外部自动运行模式时,确认开关不起作用。
2 、启动键(绿色):通过启动按键,可启动一个程序。
3 、确认开关
4 、USB 接口:用于例如存档/恢复。
仅适于 FAT32 格式化的 U 盘。
5 、确认开关
6 、型号铭牌
1.KUKA机器人变量的应用-----常用系统变量介绍:
2.KUKA常用述语用详解
3.库卡机器人编程之BAS程序
4.库卡机器人零点校准
5.工业机器人新机拆箱的哪些事

库卡KUKA工业机器人KRC4示教器的使用方法如上面所描述,如大家对库卡机器人的使用方法和库卡机器人的KCP4的示教器使用方法不理解或是有任何疑问,随时都可以与昌盛机器人的苏先生联系(137-2837-2820)
文章来源来网络,如有相同,请与昌盛机器人的苏先生联系。